Abstrakt: Tvá?í v tvá? problému vysoké prahové hodnoty a vysokych náklad? na modelování robot? a ?kolicí platformu vyu?ívá Yueqing Technology své vlastní pr?myslové technologické vyhody v robotickém softwaru k uvolnění modulu modelování robota zalo?eného na jád?e 3D geometrie, roz?í?ení rozhraní URDF a otev?ení simulace a analyzy robot? ROS.
Tvá?í v tvá? problému vysoké prahové hodnoty a vysokych náklad? na platformu pro modelování robot? a ?kolicí platformu Yueqing Technology vyu?ila své pr?myslové technické vyhody v softwaru pro roboty a vydala modul pro modelování robot? iRobotCAM zalo?eny na platformě jádra 3D geometrie.
- Díky mo?nostem modelování iRobotCAM a mo?nostem vlastního fyzikálního enginu m??e iRobotCAM rychle vytvá?et a spravovat modely robot? a provádět fyzické simulace.
- Díky roz?í?enym rozhraním pro import a export URDF se iRobotCAM dále propojuje s roboty ROS, co? u?ivatel?m umo?ňuje propojit modelování robot? a simulaci robot?, aby mohli efektivněji trénovat fyzicky model robot?.
Ní?e uvádíme nejjednodu??í pr?myslovy robot jako p?íklad pro dal?í rozpracování toho, jak pou?ívat iRobotCAM k realizaci modelování a tréninkového modelu robota:
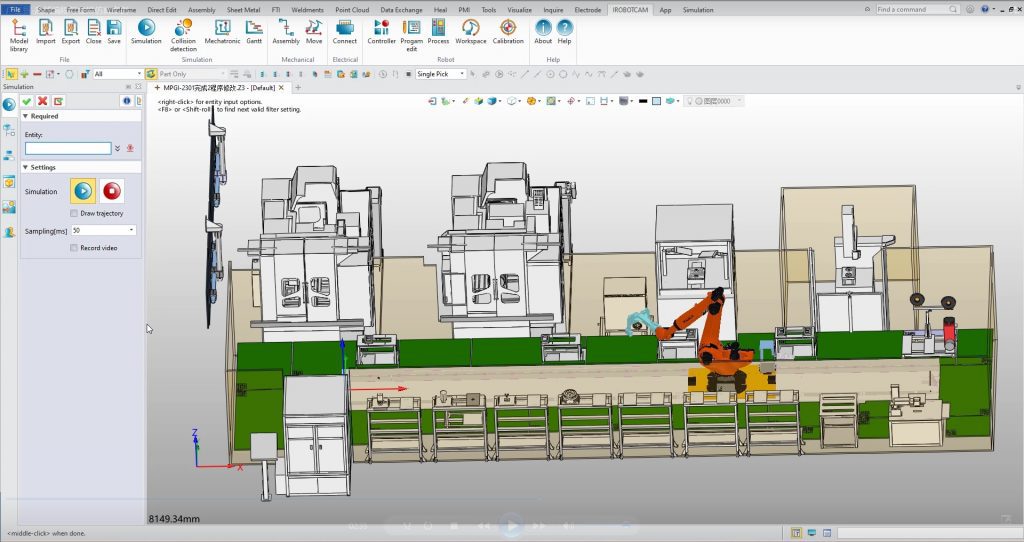
- Digitální 3D modelování scény
- Pomocí funkce 3D modelování m??e iRobotCAM vytvá?et slo?ité 3D modely a dokon?it modelování digitálních scén.
- Podporujte import formát? iges, STEP, Solidworks, Creo, NX, Catia, Inventor, Parasolid a dal?ích 3D formát? za ú?elem opětovného pou?ití stávajících 3D model? a zlep?ení efektivity konstrukce digitálních scén robot?.
- Knihovna mechatronického designu a robotiky
- Vytvo?ení prost?edí senzorovych dat: podpora signálovych systém? PLC v?etně Siemens, Mitsubishi, Inovance a dal?ích zna?ek a podpora p?izp?sobení více za?ízení pro p?ístup k signálu
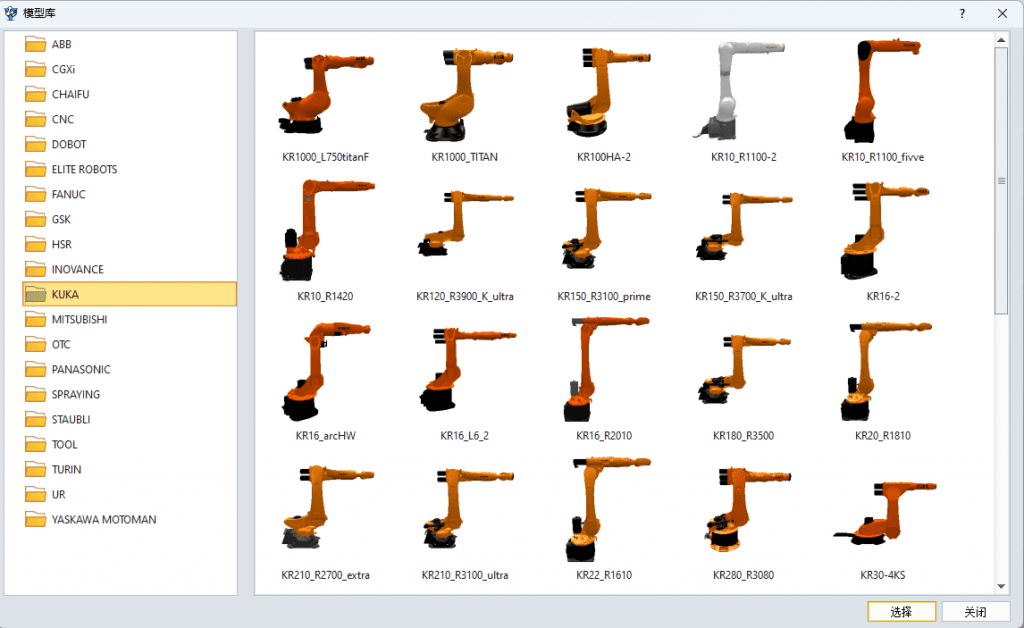
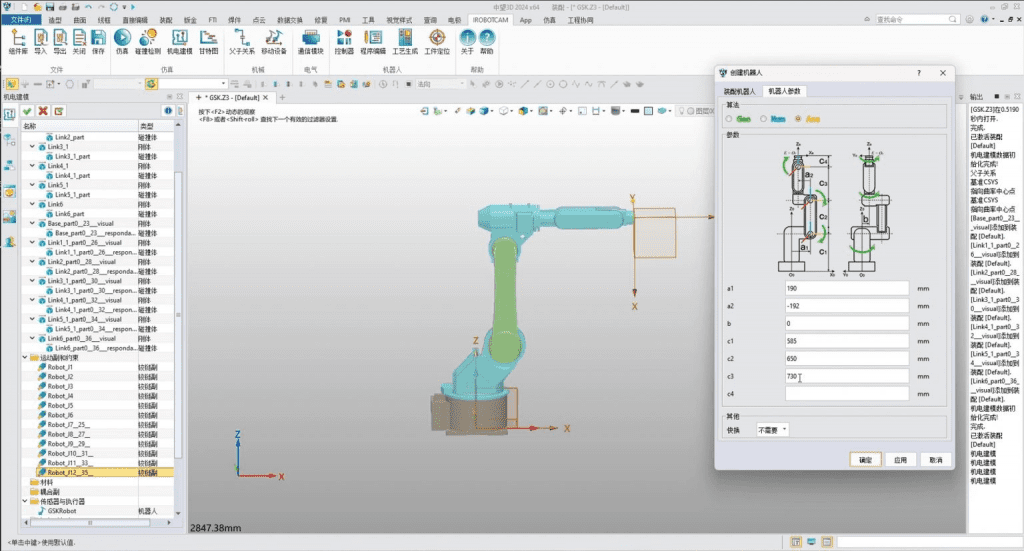
- Z?ízení knihovny robot?: Pro pr?myslové roboty m??ete pou?ít vestavěné knihovny robot? v?etně ABB, Kuka, Yaskawa, Fanuc, Estun, Guangzhou CNC, Huazhong CNC, Yuejiang, AUBO a Turing k vytvo?ení model? simulace robot? nebo k vytvo?ení vlastní knihovny robot? pomocí funkcí p?izp?sobení robota. U humanoidních nebo kolovych robot? lze podle pot?eby stanovit podrobné informace o spojích odpovídajících ?ástí a vytvo?it celkovou definici spoje, detekci kolizí atd. tak, aby vytvo?ila kompletní knihovnu specifickych humanoidních nebo kolovych robot?.
- Trénink robot?
- Vytvo?ení modelu plánování trajektorie robota: podpora simulace IO komunikace více stroj?, synchronizace více robot? a plánování propojení robot? s více osami;
- Trénink fyzickych model? trénovanych roboty: Podporuje simulaci fyzikálních charakteristik pomocí vlastního fyzikálního enginu, v?etně po?adavk? na vyhybání se p?eká?kám, analyzy kolizí a dal?ích datovych model?, a podporuje roz?í?ení rozhraní t?etích stran na podporu trénovacích algoritm? robot? ve specifickych scéná?ích.
- Dokování dat s roboty ROS pro dosa?ení spole?ného ladění
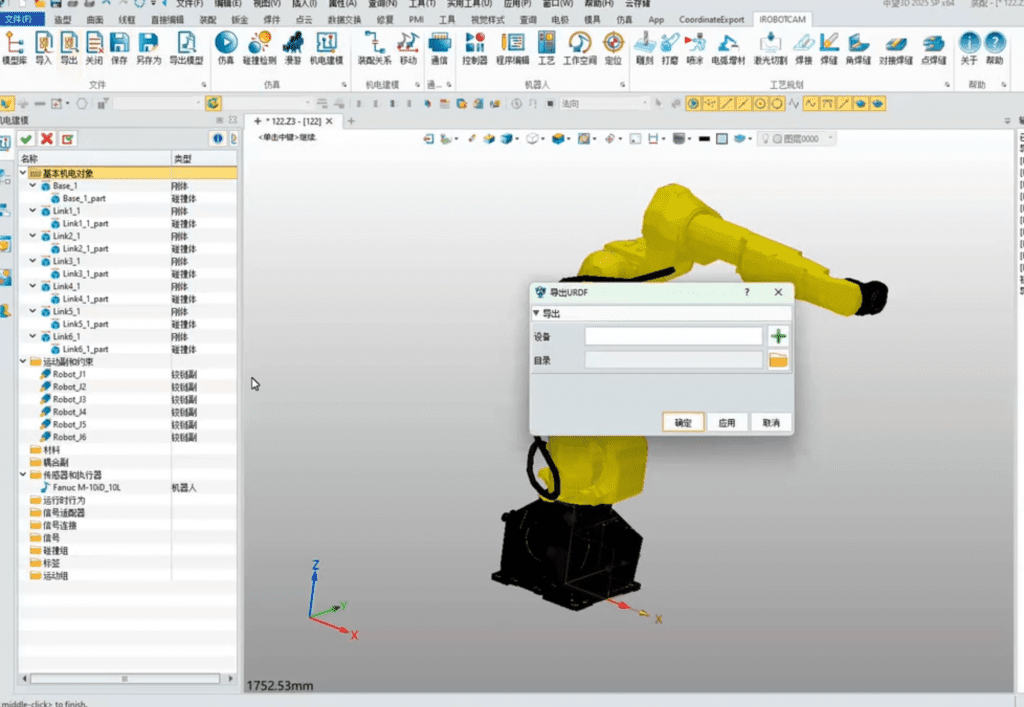
- Model optimalizace robota dokon?eny iRobotCAM lze exportovat do URDF pro dal?í simulaci a provádění robot? ROS
- Pomocí funkce importu URDF lze základní model robota importovat do iRobotCAM a datové prost?edí robota lze dále upravovat a trénovat na iRobotCAM, aby splňovalo cíle návrhu datového modelu robota.
O technologii Yueqing
Yueqing Technology se zavázala k vybudování otev?ené offline programovací platformy robot? iRobotCAM, co? je digitální ?e?ení integrující elektromechanicky koncep?ní návrh vyrobních linek, simulaci programování zpracování robot? a virtuální ladění.
webové stránky iRobotCAM: m.euromedic-care.com; Kontakt: cooperation@iRobotCAM.com