?zet: Robot lazer i?leme giderek daha fazla kullan?l?yor ve robot i?leme teknolojisinin h?zl? programlanmas? ve simülasyonu, sürecin do?rulu?unu kolayca do?rulayabilir. Yerli robot ?evrimd??? programlama yaz?l?m?n?n temsilcisi olarak, iRobotCAM, iRobotCAM’in kullan?c? dostu programlama sürecini kullanarak, süre? programlama ve simülasyon do?rulamas? i?in lazer i?lemenin kolayl???n? daha da sa?lar.
Herhangi bir i?leme teknolojisinin do?u?u, endüstriyel uygulamalarda belirli türden sorunlar? ??zmektir. Lazerin uygulanmas? giderek daha yayg?n hale geliyor, bunun ba?l?ca nedeni lazerin enerjisi kontrol edilebilir oldu?unda, daha karma??k i?leme teknolojisi ger?ekle?tirilebilir, b?ylece ?e?itli basit iki eksenli ila be? eksenli lazer kesim türlerinde veya daha karma??k havac?l?k ve di?er par?alarda kullan?labilir. Lazer kaynak alan? ayr?ca ?e?itli par?a türlerinin i?lem ihtiya?lar?n? kar??lar. Robotik lazer i?lemeyi daha iyi kullanmak i?in, lazerin donan?m yeteneklerinin yan? s?ra, i?lem olu?turma y?rüngelerinin ve simülasyonlar?n?n rahatl??? ve do?rulu?u i?in daha fazla gereksinim ortaya konmaktad?r.
Robotik lazer i?leme i?in, lazer kesim teknolojisindeki zorluklar? ?rnek olarak ele al?rsak, esas olarak a?a??dakiler vard?r:
- Dü?ük konumland?rma ve düzeltme verimlili?i ve zay?f uyarlanabilirlik : ?izgi lazer konumland?rma veya diren? konumland?rma y?ntemlerinin s?n?rlamalar? vard?r. ?izgi lazer kesi?imi giri?ime kar?? hassast?r ve diren? konumland?rman?n i? par?as?n?n yerle?tirilmesi i?in gereksinimleri vard?r. Konumland?rma ve düzeltme ?? par?as?n?n yerle?tirilmesinde herhangi bir sapma varsa, konumland?rmada ba?ar?s?z olmak kolayd?r. Büyük veya karma??k i? par?alar? i?in, tüm kenarlar?n tek tek taranmas? gerekir, bu da daha az verimlidir. Ve bu y?ntemler genellikle yaln?zca yerel konum düzeltmesi sa?lar ve ark ?eklindeki ?zel ?ekilli par?alara zay?f uyarlanabilirli?e sahiptir.
- Robot y?rünge planlamas? : Robot y?rünge programlamas? esnek olmas?na ra?men, baz? karma??k veya hassas kesme g?revlerinde, kesme verimlili?ini ve kalitesini art?rmak i?in robotun hareket y?rüngesinin nas?l optimize edilece?i hala bir sorundur.
- Ekipman bak?m? ve kalibrasyonu : Lazer kesim robotlar?, lazer yay?c?lar, sens?rler ve robotik kollar gibi birden fazla hassas bile?en i?erir. Bu bile?enlerin bak?m? ve kalibrasyonu, kesim hassasiyetini korumak ve ekipman ?mrünü uzatmak i?in kritik ?neme sahiptir. Ancak, düzenli bak?m ve kalibrasyonun nas?l yap?laca?? ve ekipman ar?zalar?na nas?l h?zl? bir ?ekilde yan?t verilece?i, robotik lazer kesim sürecinde kar??la??lmas? gereken sorunlard?r.
Robot ?evrimd??? programlama ve simülasyon yaz?l?m? olan iRobotCAM, robot lazer i?leme süre?lerinin gereksinimlerini hedef al?yor ve kaynak alan?nda son on y?lda yapt??? ara?t?rma ve geli?tirme birikimine dayan?yor.
- ü? boyutlu CAD platformunun ?l?eklenebilirli?inden yararlan?larak, lazer kaynak y?rüngelerinin ??kar?lmas?n?n otomasyonu ger?ekle?tirilmekte ve lazer y?rüngelerinin hassas kontrolü daha da sa?lanmaktad?r.
- Robot fizi?i motorlar? konusunda uzun y?llara dayanan ara?t?rma ve geli?tirme deneyimimizi kullanarak, robot lazer proseslerinin simülasyonunu h?zla ger?ekle?tirebiliyor ve i?leme prosesinin dijital ikizini ger?ekle?tirebiliyoruz.
- iRobotCAM’in y?rünge olu?turma ve y?rünge optimizasyon modülleri kullan?larak robotun y?rüngesi, ?arp??malar?, tek noktalar? ve ula??lamayan noktalar? ?nleyecek ?ekilde otomatik olarak ayarlanabiliyor.
- iRobotCAM’in üretim hatt? tasar?m? ile robot programlama ve simülasyonunu bir araya getirerek, tasar?m ve simülasyonun entegrasyonunu sa?layarak üretim hatt? düzeyinde tasar?m ve simülasyonu ger?ekle?tirebilir.
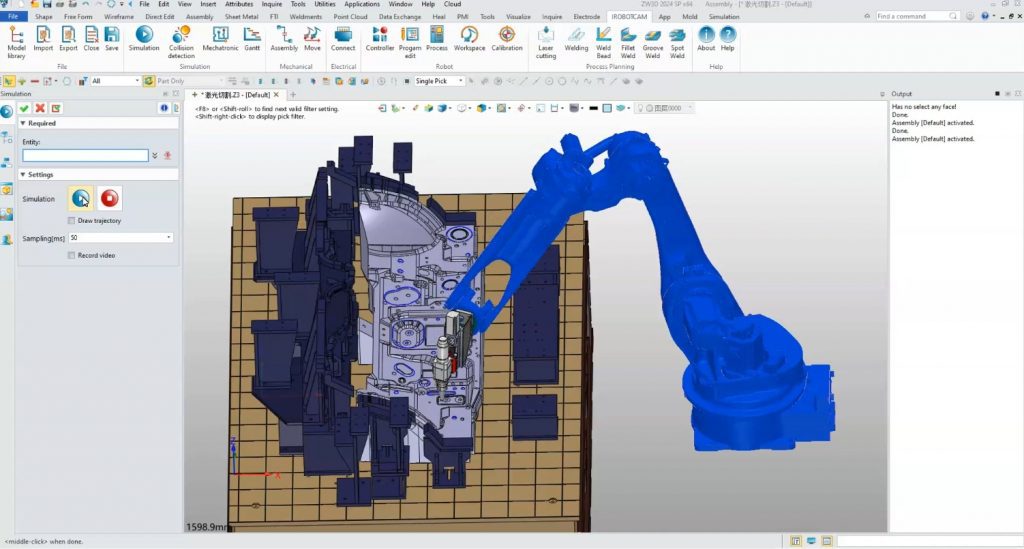
iRobotCAM’in robot lazer i?leme programlama ve simülasyonunu nas?l kolayl?kla ger?ekle?tirebilece?ine bir bakal?m.
Yueqing Teknolojisi Hakk?nda :
Yueqing Technology, üretim hatlar?n?n elektromekanik kavramsal tasar?m?n?, robot i?leme programlama simülasyonunu ve sanal hata ay?klamay? birle?tiren dijital bir ??züm olan a??k bir iRobotCAM robot ?evrimd??? programlama platformu olu?turmaya kendini adam??t?r.