概要: Yueqing Technology は、レーザー加工のプログラミングとシミュレーション技術(shù)に関するホワイト ペーパーを発表しました。このホワイト ペーパーでは、レーザー加工技術(shù)の応用における高精度制御の難しさについて説明し、さらに、レーザー加工の軌跡とシミュレーション スキーム、iRobotCAM を効果的に使用してレーザー加工とシミュレーションを完了する方法、レーザー加工の応用シナリオの設(shè)備開発とレーザー加工の応用効率を大幅に向上させる方法について説明しています。
- レーザー産業(yè)の概要
レーザー産業(yè)は雇用規(guī)模や將來の市場(chǎng)規(guī)模が大きく、急速な発展期にあります。
- レーザー技術(shù)の特徴
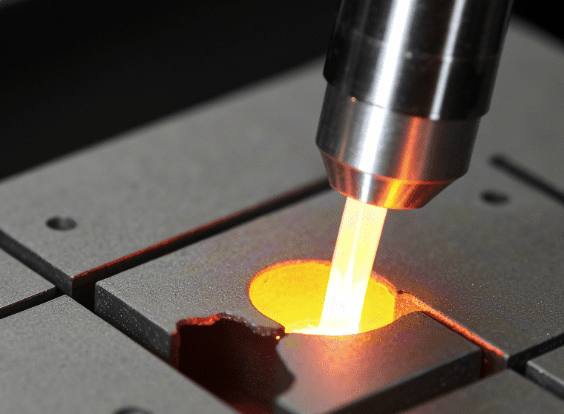
レーザー加工の最大の特徴は高精度です。レーザー技術(shù)の応用をより深く理解するために、レーザー技術(shù)応用の設(shè)備シナリオから始め、レーザー工作機(jī)械やロボットレーザー加工アプリケーションの開発と応用を典型的な応用として取り上げ、その課題をさらに分析し、解決策を詳しく説明します。
- レーザー工作機(jī)械の開発と応用
レーザー工作機(jī)械の設(shè)備開発プロセスから始めて、工作機(jī)械におけるレーザー技術(shù)の応用上の難しさや解決策をさらに理解することができます。
レーザー加工機(jī)開発プロセス:3D構(gòu)造モデリング<電気機(jī)械モデリングと動(dòng)作シミュレーション<軌道生成と仮想デバッグ<後処理と加工シミュレーション
以下では、レーザー工作機(jī)械の開発およびデバッグ用のソフトウェアソリューションとして iRobotCAM を使用して、レーザー工作機(jī)械の開発と仮想デバッグを段階的に実裝し、レーザー工作機(jī)械の量産と応用を?qū)g現(xiàn)する方法について説明します。
1) 3D 構(gòu)造モデリング: iRobotCAM は 3D CAD プラットフォームの特性を利用して、工作機(jī)械の 3D 構(gòu)造のデジタル モデルを迅速に構(gòu)築します。
2) 電気機(jī)械モデリングと動(dòng)作シミュレーション:iRobotCAMには、生産ラインのモデリングと設(shè)計(jì)、ロボットの仮想デバッグに使用できる電気機(jī)械モデリングモジュールが搭載されています。実際の生産前に、仮想環(huán)境でレーザー加工プロセスをシミュレーションすることで、ロボットの動(dòng)作の衝突干渉、ロボットの特異點(diǎn)の確認(rèn)、到達(dá)可能性と衝突、レーザー経路エラーなど、起こりうる問題を事前に発見?解決し、実際のデバッグにおけるエラーとリスクを軽減し、生産効率と安全性を向上させます。
3) 軌道生成と仮想デバッグ:ZW3Dプラットフォームに基づいて開発され、ZW3Dのさまざまな2軸から5軸の軌道アルゴリズムを利用できるため、ロボットはレーザー加工プロセス中にCAMソフトウェアと同様の正確な軌道アルゴリズムを持ち、レーザービームを加工部分に正確に焦點(diǎn)を合わせることができ、高精度のレーザー切斷、溶接、彫刻などのプロセスを?qū)g現(xiàn)し、加工品質(zhì)と一貫性を保証します。
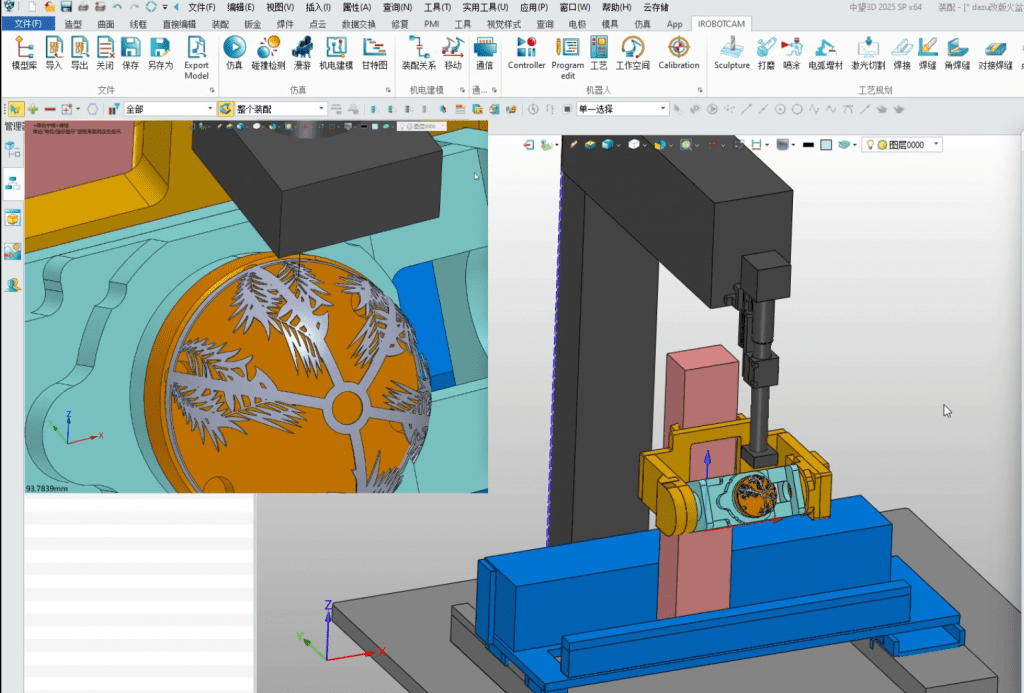
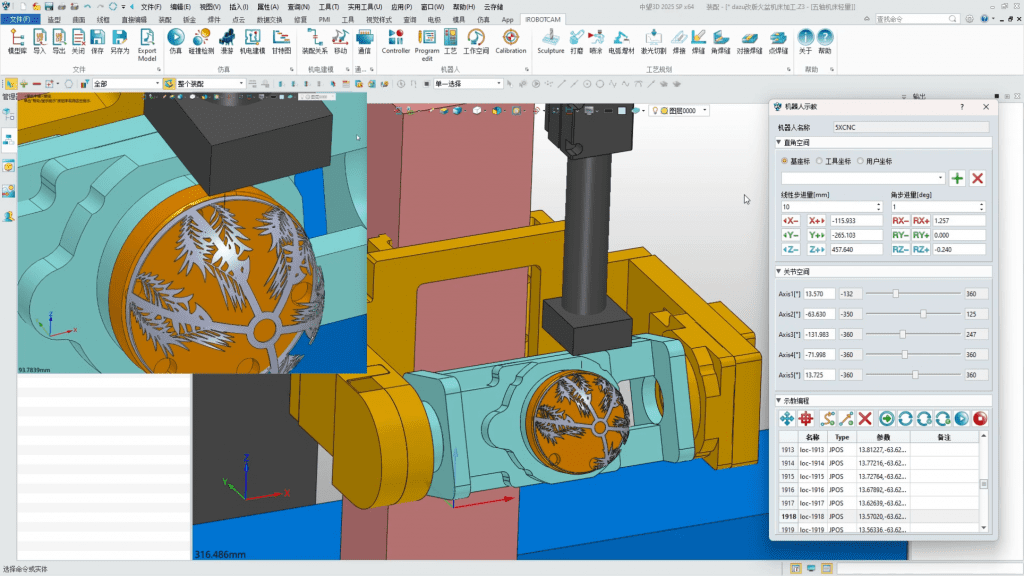
4)後処理と加工シミュレーション:iRobotCAMの便利な後処理モジュールは、コードを素早く生成し、加工シミュレーションの効果を直感的に表示することができます。
iRobotCAM が 5 軸工作機(jī)械を使用してレーザー加工とシミュレーションを?qū)g現(xiàn)する方法を見てみましょう。
4. ロボットレーザー技術(shù)の応用
ロボットレーザー技術(shù)は高精度を主眼としており、レーザーを用いた高精度製造を?qū)g現(xiàn)する能力は、航空宇宙、自動(dòng)車、機(jī)械など様々な産業(yè)における高性能?高精度機(jī)器の実現(xiàn)の基盤となっています。ロボット業(yè)界において、レーザー技術(shù)の応用における課題は何でしょうか?ロボットレーザー技術(shù)の応用を迅速に実現(xiàn)するにはどうすればよいでしょうか?
まず、ロボットレーザー加工技術(shù)の場(chǎng)合、一般的なプロセスは次のとおりです。
ロボットとワークのインポート > ワークの位置決めとロボットのキャリブレーション > 軌道プログラミングの実現(xiàn) > シーン全體のシミュレーション > コード出力とロボット処理
上記のプロセスから、レーザー技術(shù)の焦點(diǎn)はデジタル環(huán)境の構(gòu)築とコードの出力?シミュレーションにあることがわかります。iRobotCAMオフラインプログラミングソフトウェアを例に、iRobotCAMを使用してロボットレーザー技術(shù)を効率的に応用する方法を説明します。
1) 3D CADプラットフォームの機(jī)能をベースにしたiRobotCAMを使用すると、機(jī)器やプロセスのデジタル化を迅速にモデル化できます。
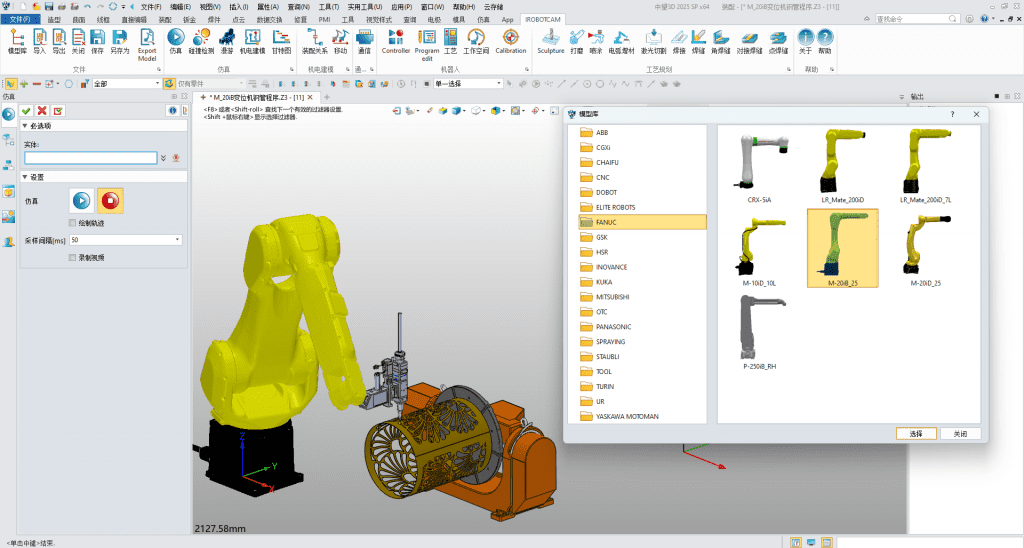
2) iRobotCAMのマシンライブラリを使用すると、レーザーアプリケーションに関連するロボットやツールを迅速に構(gòu)築できるため、將來的に基本的な部品ライブラリを繰り返し構(gòu)築する必要がなくなり、企業(yè)がデジタルモデルをより効率的に使用できるようになります。
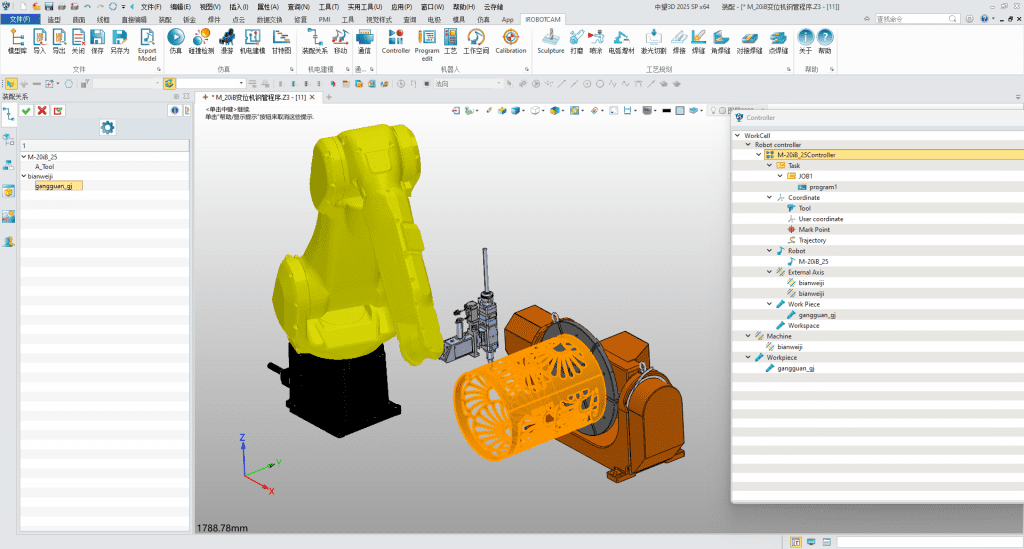
3) iRobotCAM獨(dú)自の位置決め機(jī)能を活用することで、レーザー加工の要件に応じてワークピースを迅速かつ正確に位置決めできます。具體的には、iRobotCAMはワークピースのCADデータに基づいて、様々な作業(yè)條件下でワークピースの位置決めを?qū)g現(xiàn)します。
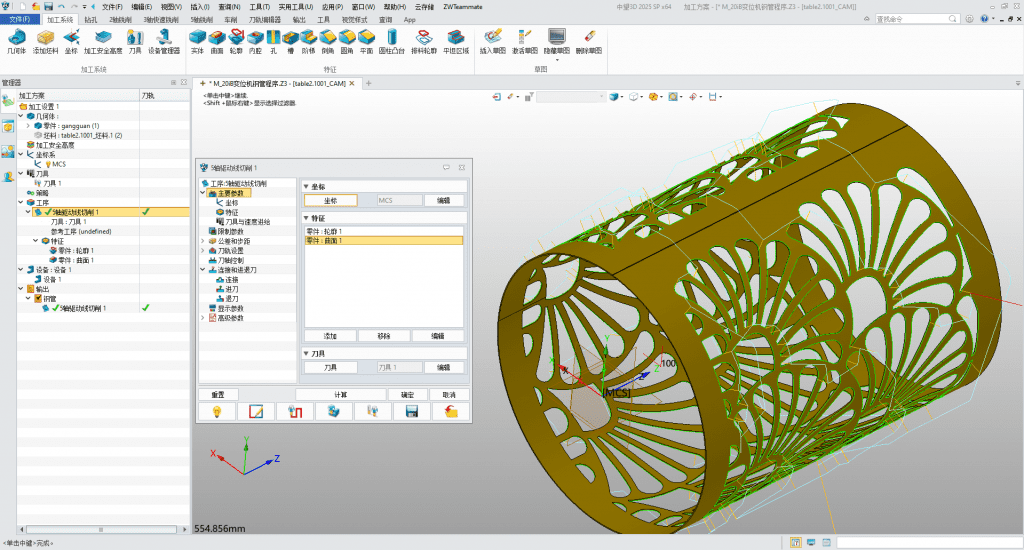
4) iRobotCAMの軌跡生成機(jī)能を活用することで、曲面上の複雑な多軸軌跡を生成し、7軸以上のロボットへのレーザー加工の適用を?qū)g現(xiàn)します。
5) iRobotCAM のロボット仮想デバッグ機(jī)能を使用すると、ロボットのレーザーシーンプログラミングと仮想シミュレーションを?qū)g現(xiàn)し、ロボット技術(shù)の適用効果を効率的に確認(rèn)できます。
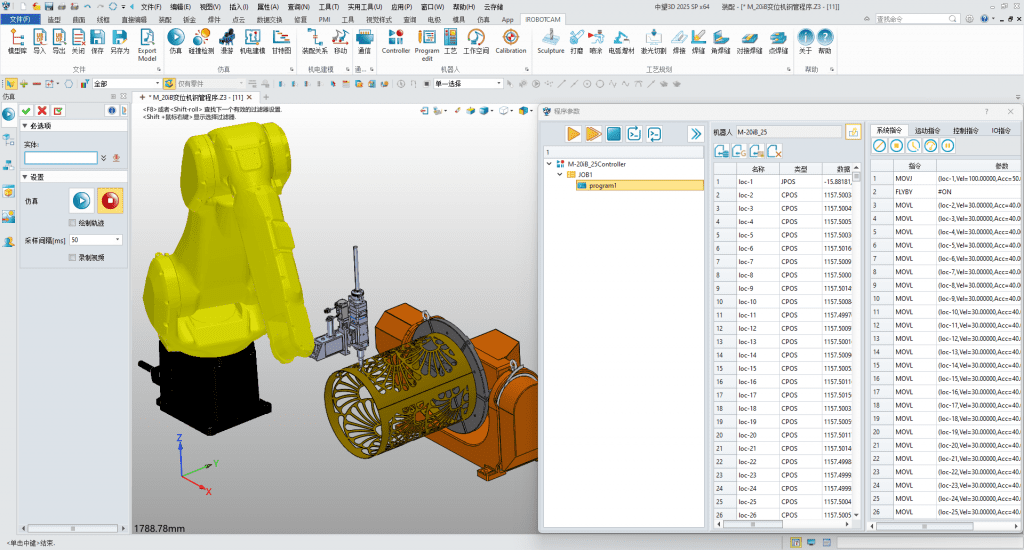
6. iRobotCAM の後処理機(jī)能を活用することで、FANUC、ABB、Yaskawa、KUKA、GSK、STEP、Estun、Turin などのさまざまなタイプのロボットに効率的に適応し、1 セットのソフトウェアを使用して複數(shù)のブランドまたは複數(shù)のデバイスを効率的に管理できます。
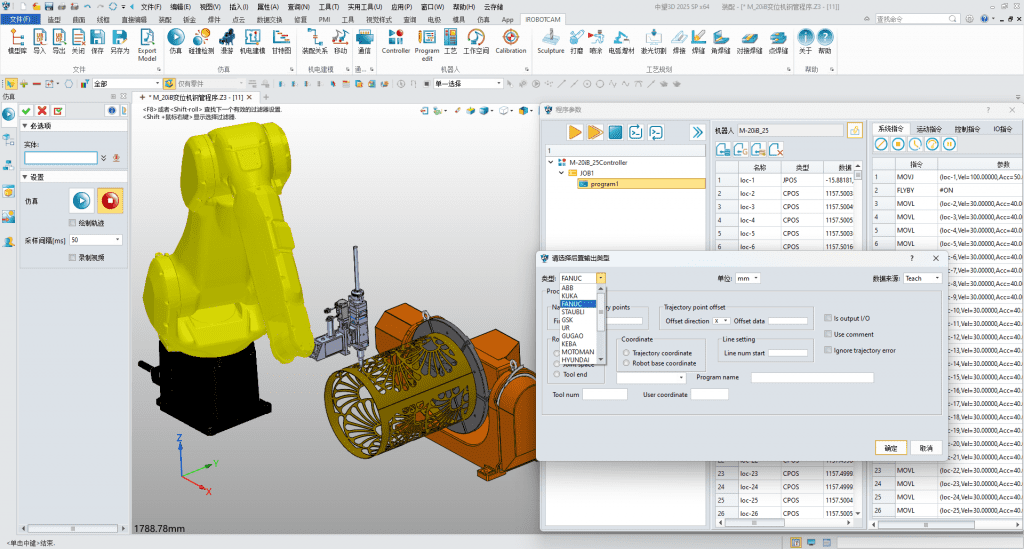
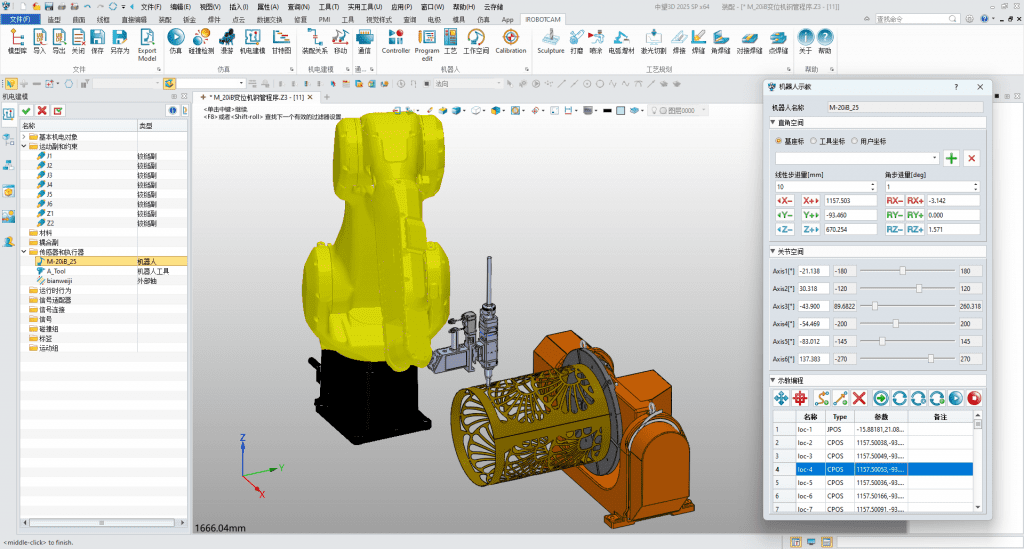
次に、iRobotCAMがロボットを用いて5軸中空パターン加工を?qū)g現(xiàn)する方法を見てみましょう。iRobotCAMの柔軟なプログラミング機(jī)能により、5軸軌道生成と迅速なロボットシミュレーションが可能になります。
5. まとめ
レーザー技術(shù)応用の核心は精度であり、高精度なアーキテクチャ設(shè)計(jì)にはプログラミングとシミュレーションが不可欠です。上記の典型的な5軸レーザー加工機(jī)の応用事例とロボット多軸レーザー加工の応用シナリオから、レーザー加工と仮想デバッグのソリューションとしてiRobotCAMを選択することで、レーザー加工の根底にある高精度問題を効果的に解決できることがわかります。さらに、レーザー加工のプロセス応用として、iRobotCAMは技術(shù)アーキテクチャのオープン性により、レーザー切斷、レーザークラッディング、アーク積層造形アプリケーションなど、より多くのシナリオへの応用を拡大し、その明らかな高精度技術(shù)の優(yōu)位性を発揮します。
Yueqing Technologyについて
Yueqing Technology は、生産ラインの電気機(jī)械概念設(shè)計(jì)、ロボット処理プログラミングシミュレーション、仮想デバッグを統(tǒng)合したデジタルソリューションであるオープンな iRobotCAM ロボット オフライン プログラミング プラットフォームの構(gòu)築に取り組んでいます。
iRobotCAM ウェブサイト: m.euromedic-care.com; お問い合わせ: collaboration@iRobotCAM.com