Abstrakt: Aplikace kolaborativních robot? pomáhá uvolnit velké mno?ství opakující se ru?ní práce a vyrazně zlep?it efektivitu vyroby. Základ r?znych aplikací pro spolupráci robot? spo?ívá v programování a simulaci robot?. Prost?ednictvím offline programovacího softwaru domácích robot? iRobotCAM lze kolaborativní roboty, jako je Yuejiang, rychle pou?ít k realizaci programování robot? a virtuální simulace.
S rostoucí flexibilitou robotickych aplikací, zejména vysokym stupněm volnosti a vysokou p?esností kolaborativních robot?, pr?myslová odvětví v?etně letectví, automobil? a elektroniky p?ijala velky po?et kolaborativních robot?, aby osvobodila opakovanou manuální práci a vyrazně zlep?ila efektivitu vyroby. Programování a simulace r?znych scéná?? spolupráce robot? jsou základem aplikací kolaborativních robot?. Tento ?lánek p?edstaví iRobotCAM, domácí offline programovací software pro roboty vyvinuty na základě 3D modelovací platformy CAD, a jako p?íklad si vezmeme kolaborativní robot debot, ktery p?edstaví, jak rychle pou?ít kolaborativní roboty debot k realizaci programování robotického sva?ování a virtuální simulace.
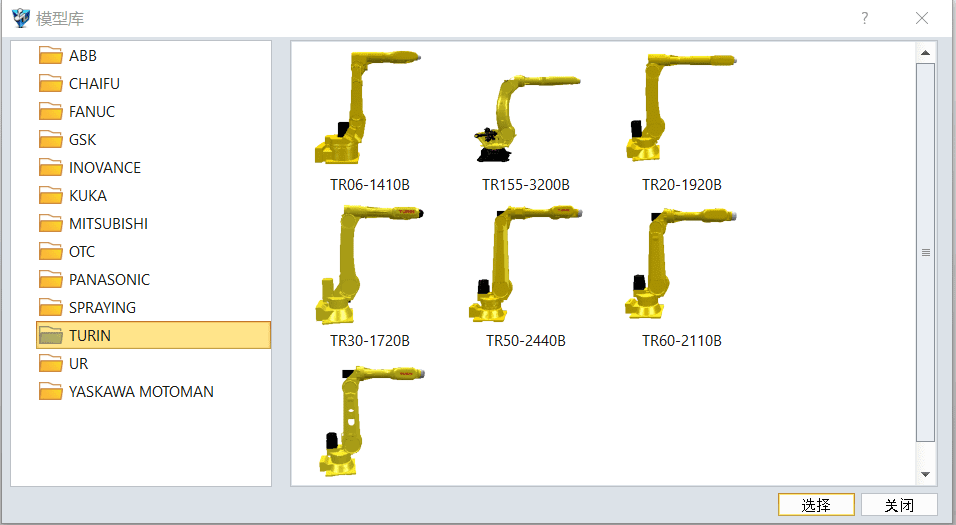
- S knihovnou robot? iRobotCAM m??ete pou?ívat stávající knihovny robot? ABB, ZF, FANUC, Guangzhou CNC, Inovance, Kuka, Mitsubishi, Panasonic, Zhihui, Turin, UR, Yaskawa a dal?í knihovny nebo rychle vytvá?et nové knihovny spolupracujících robot?, jako je debot Robotics podle pot?eby. Knihovnu lze vytvo?it pomocí jednoduchych definic spoj?.
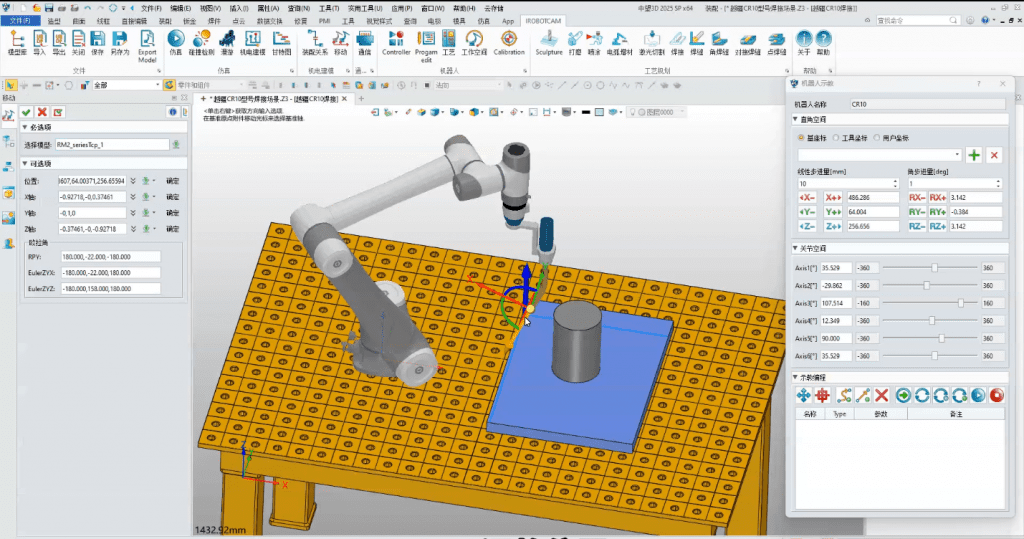
2. Pou?ijte pohodlnou vyukovou funkci iRobotCAM k dosa?ení vyukového programování pouhym p?eta?ením
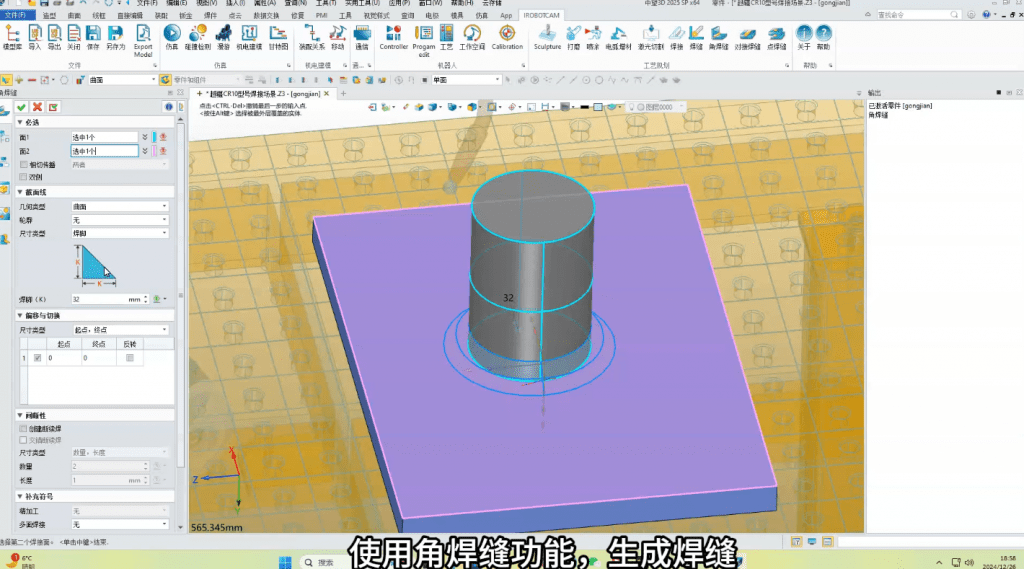
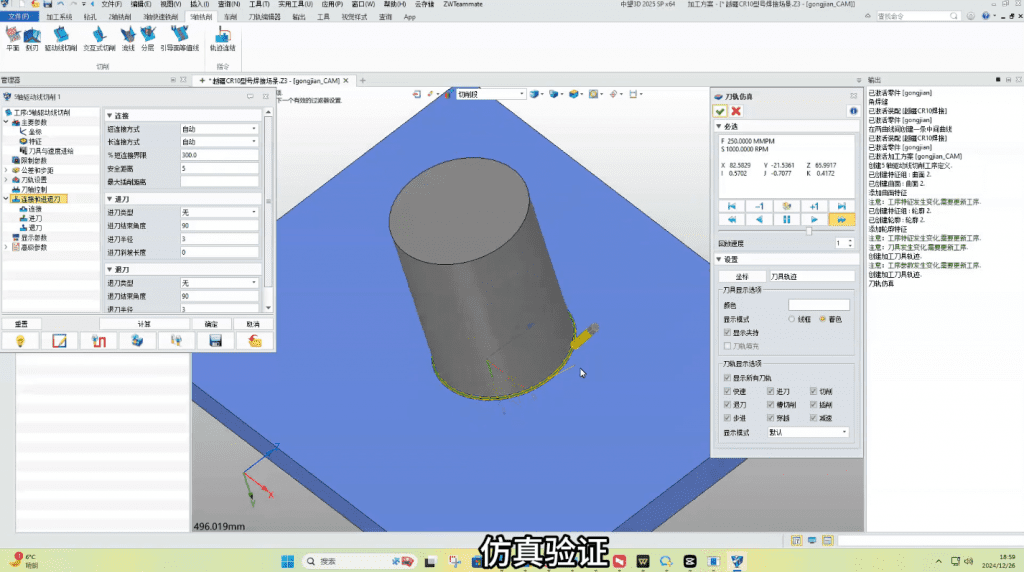
3. Pomocí sva?ovacího modulu m??ete rychle ozna?it polohu svaru a vytvo?it programy sva?ovacích funkcí.
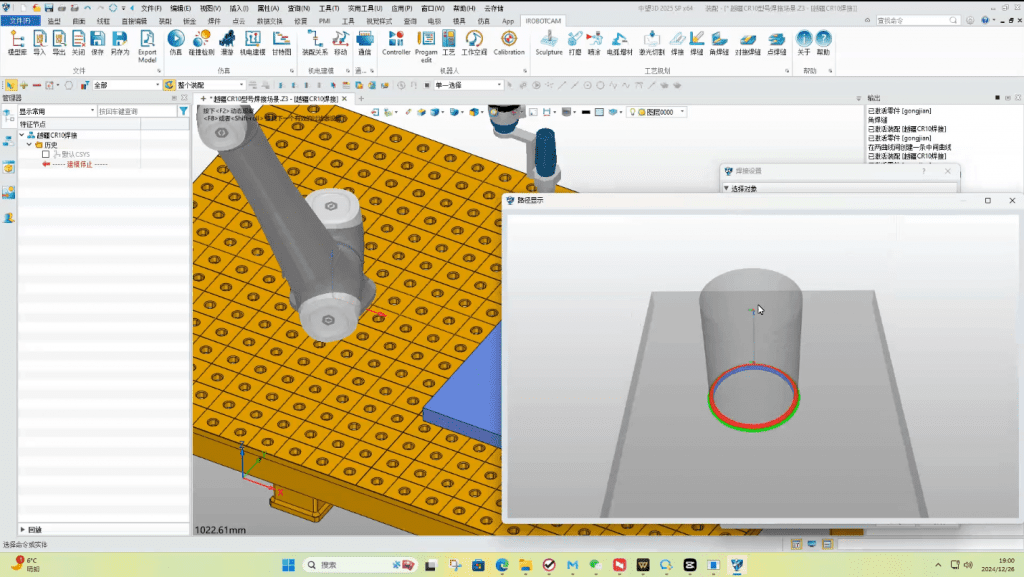
4. Pomocí bohatych dvou a? pětiosych funkcí trajektorie iRobotCAM m??ete rychle generovat trajektorie programování svar? a simulovat trajektorie.
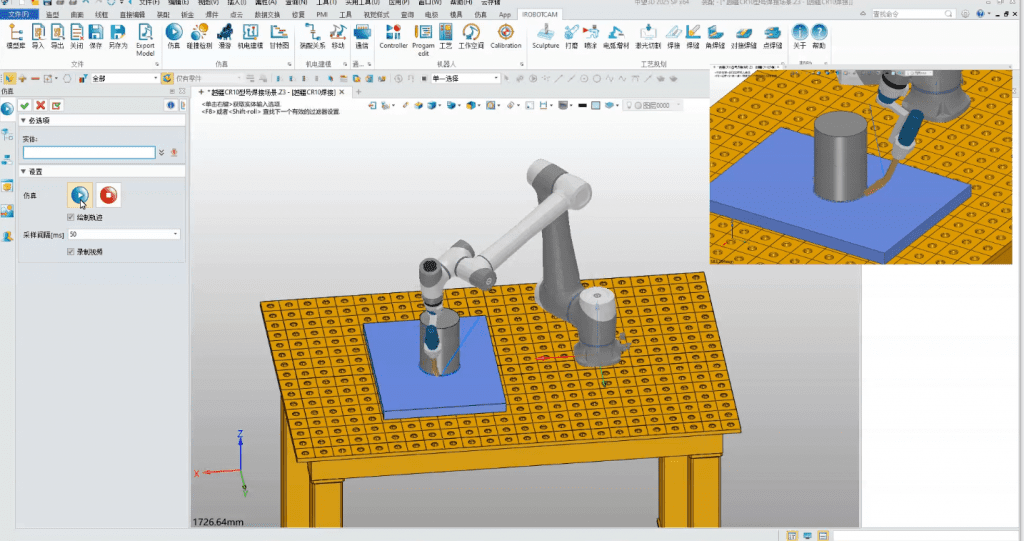
5 Pomocí efektu zpracování simulace robota iRobotCAM lze efekt sva?ování robotem dále ově?it a simulovat.
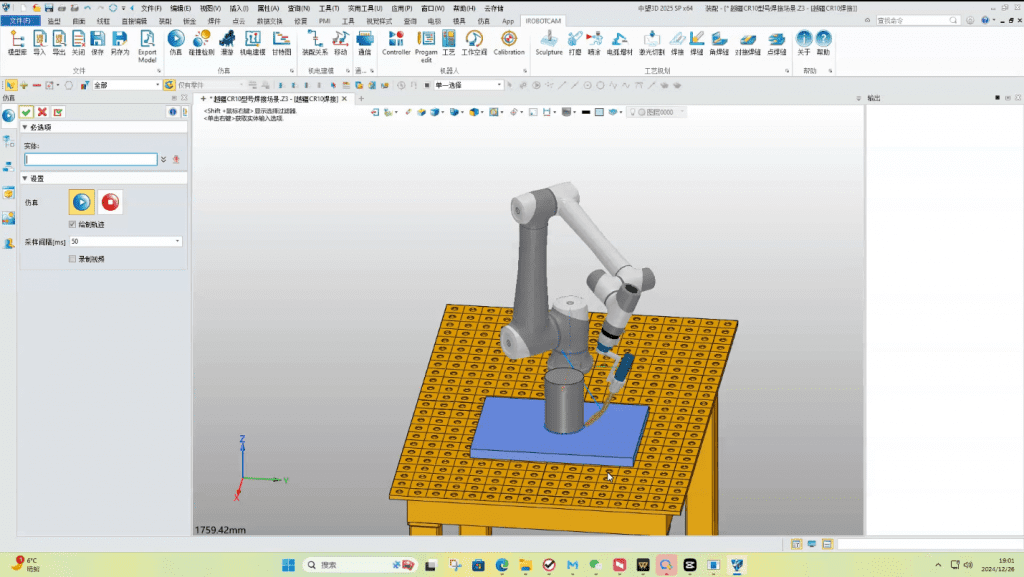
6. Pro scéná?e aplikací robot? lze iRobotCAM pou?ít k simulaci celkové sva?ovací scény robota a intuitivnímu zobrazení sva?ovacího procesu.
Následuje video ukazující programování a simulaci sva?ování pomocí kolaborativního robota debot:
O technologii Yueqing
Yueqing Technology se zavázala k vybudování otev?ené offline programovací platformy robot? iRobotCAM, co? je digitální ?e?ení integrující elektromechanicky koncep?ní návrh vyrobních linek, simulaci programování zpracování robot? a virtuální ladění.
webové stránky iRobotCAM: m.euromedic-care.com; Kontakt: cooperation@iRobotCAM.com